Overview: Self-Driving Car Simulation
This self-driving car simulation is a visual and interactive tool designed to demonstrate how an artificial intelligence (AI) model—specifically a neural network—can learn to navigate a vehicle on a multi-lane road autonomously. The simulation integrates real-time car movement, obstacle detection, and neural network visualization.
Key Features
🛣️ Driving Environment
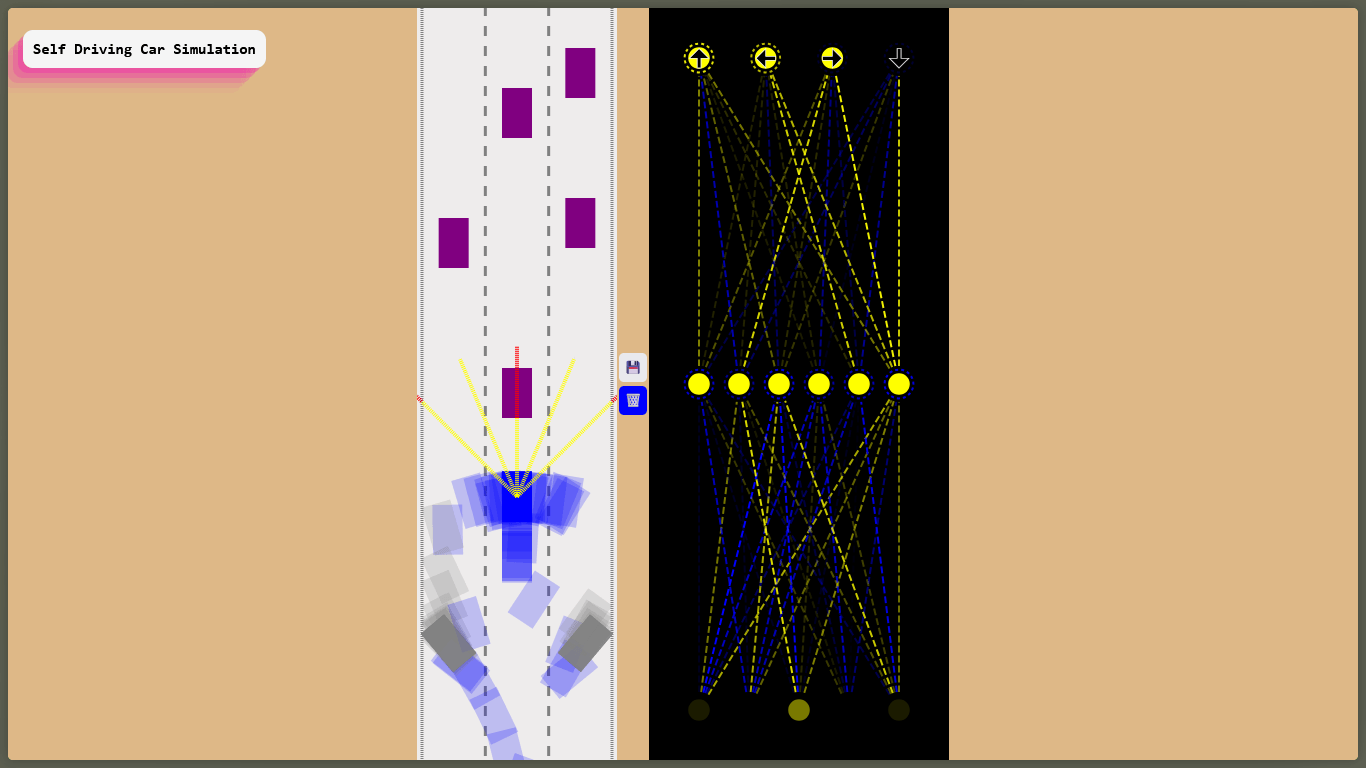
- The simulation includes a straight, multi-lane road with lane markers.
- Purple blocks represent traffic or obstacles that the AI car must avoid.
- The AI-controlled car is shown in blue with multiple faded overlays, indicating previous positions or trajectory prediction.
🧭 Sensor System
- The car uses sensor rays (yellow lines) to detect nearby objects and boundaries. These mimic technologies like LiDAR or ultrasonic sensors.
- The data collected from these sensors serves as input for the neural network.
🧠 Neural Network Visualization
- On the right side, a live representation of the neural network is displayed:
- Input layer: Receives sensor data.
- Hidden layers: Process the data using learned weights.
- Output layer: Determines driving actions (e.g., accelerate, turn left/right).
- The lines connecting nodes show the weights and activation states in real-time, where color and intensity might indicate the strength and polarity of those weights.
💾 Model Controls
- Users can save the trained neural network for later use.
- A reset/delete option allows restarting the training process or clearing the current model.